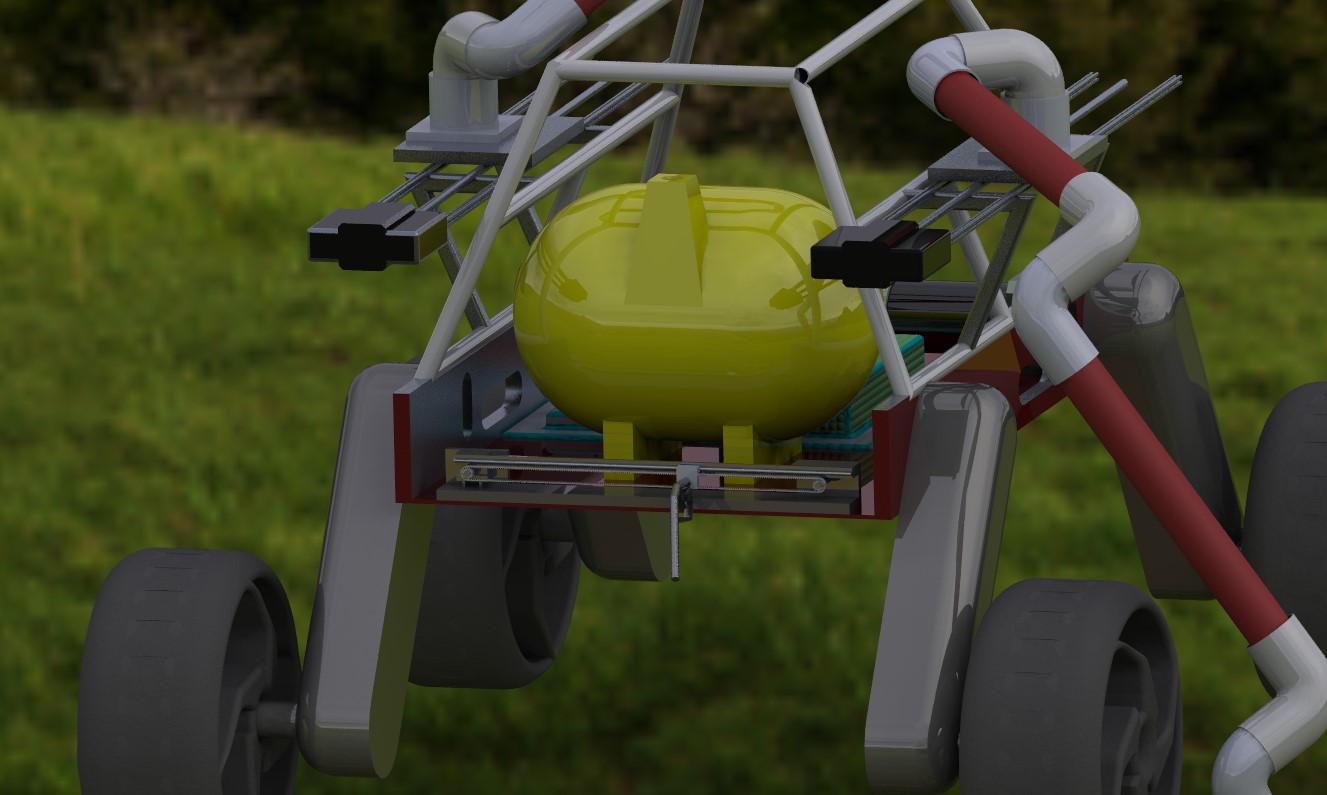
Project Gallery
Explore images showcasing different aspects of the modular agriculture robot.



.jpeg)
.jpeg)
.jpeg)
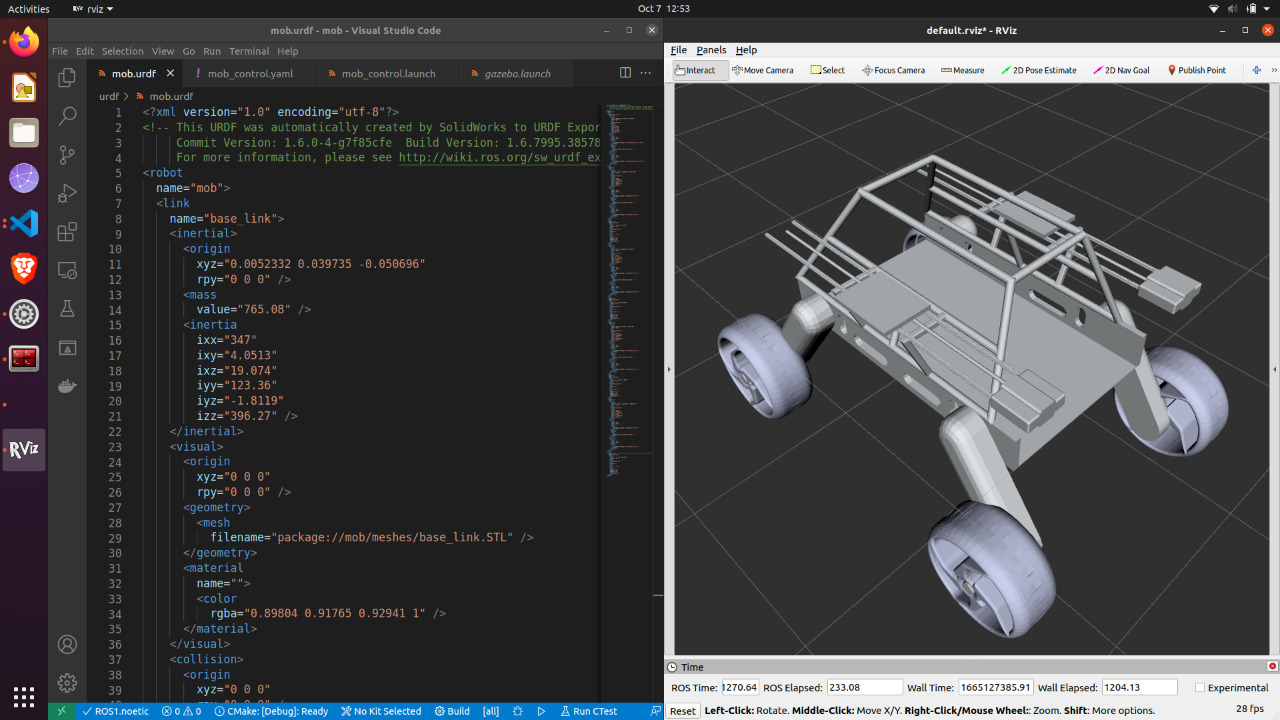

Overview: This project introduces an autonomous, modular agricultural robot designed to enhance farming efficiency through precision agriculture. The robot integrates multiple interchangeable modules to perform various farming tasks, reducing the need for individual robots for separate tasks. This system leverages ROS, Computer Visison, SolidWorks, Ansys.
Key Features:
Results & Impact
AI-powered detection models achieved 86% accuracy in weed and disease classification. Differential drive control enabled smooth robot navigation in Gazebo simulations. Cost-effective modular design reduced manufacturing costs.
Future Work:
Technologies Used:
This multifunctional robotic platform represents the future of smart farming, offering scalability, cost-effectiveness, and high efficiency for modern agricultural needs.
Explore images showcasing different aspects of the modular agriculture robot.