Gallery
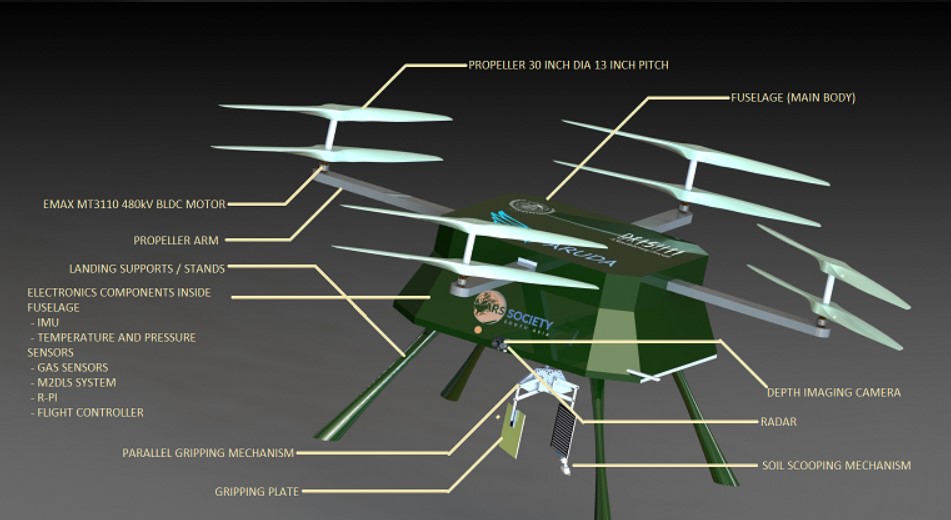

Overview: As a core developer and leader in Team Garuda – Drishti, the Aerial Robotics Club of SVNIT, I contributed to the design, development, and validation of advanced UAV systems for real-world applications. Our team participated in international competitions, pushing the boundaries of autonomous aerial robotics for planetary exploration and humanitarian missions.
Key Achievements:
Technical Contributions
Impact
Enhanced my expertise in aerospace robotics, autonomous systems, and UAV engineering. Developed a deep understanding of robotic perception, control, and embedded AI for aerial vehicles. Pioneered innovative UAV applications in planetary exploration and medical logistics, demonstrating real-world problem-solving through robotics.