Project Gallery
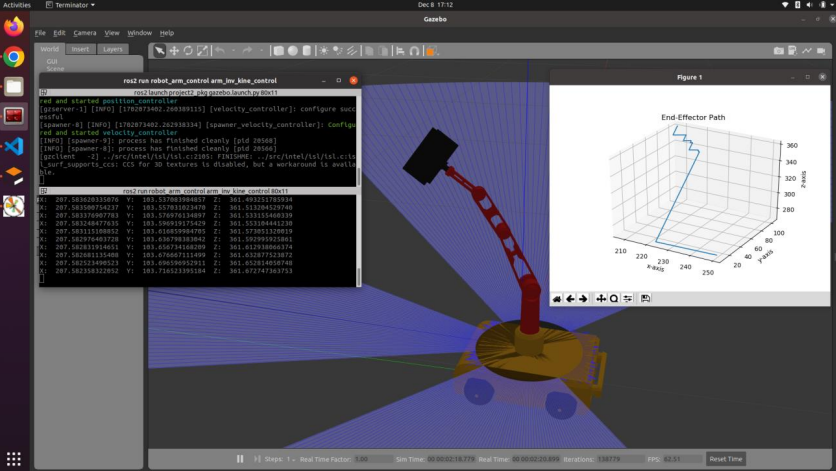
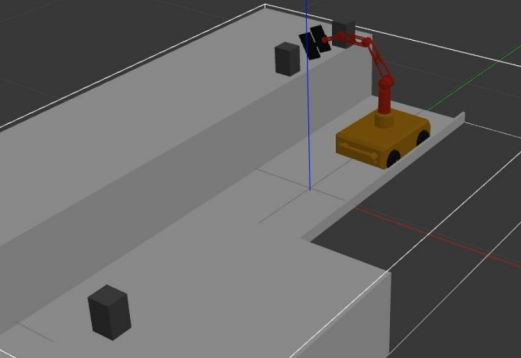

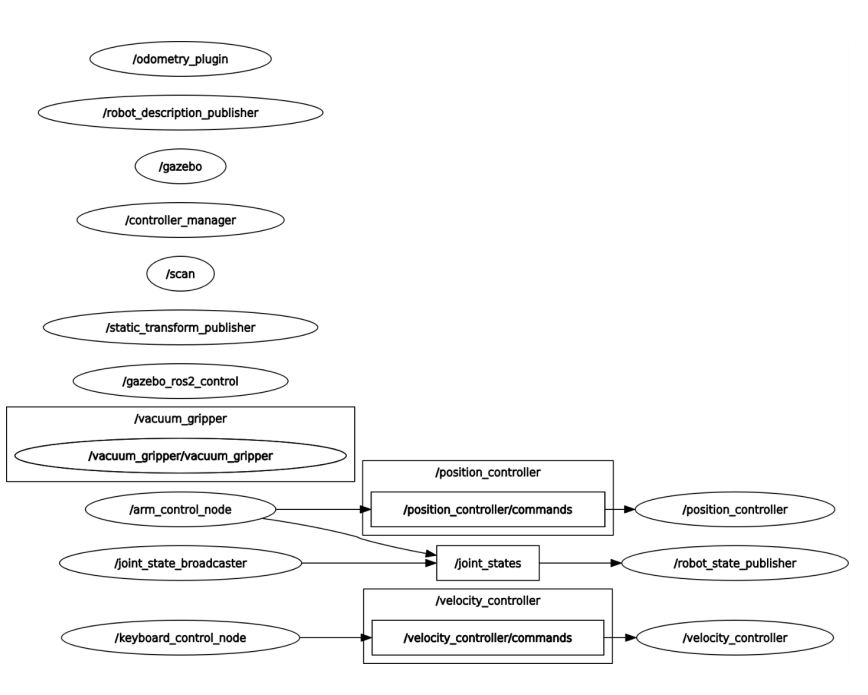
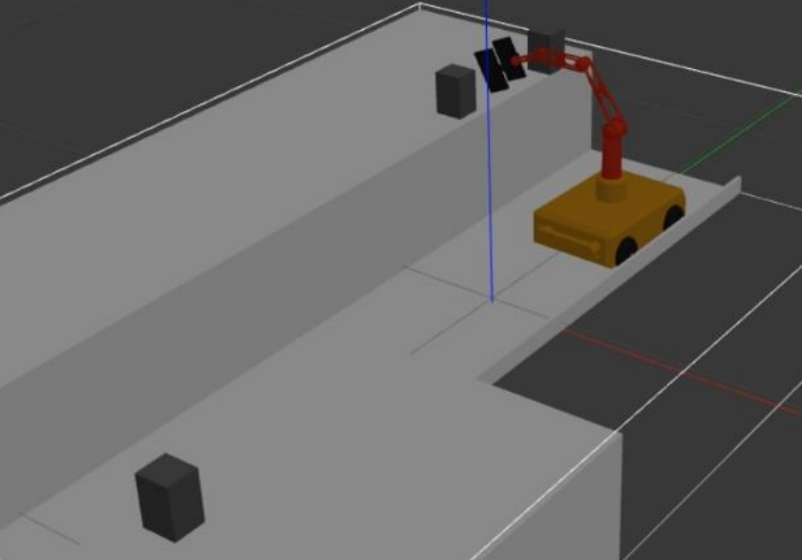
Overview: This project focuses on developing an autonomous warehouse management robot designed to enhance efficiency in package handling through automated transport, manipulation, and navigation. The system integrates a four-wheeled differential drive base with a 5-degree-of-freedom (DOF) robotic arm, controlled using ROS Nav2, teleoperation, and inverse kinematics. The robot also features LiDAR-based perception for environment mapping, making it a scalable and adaptive solution for modern logistics.
Key Features:
Results & Impact
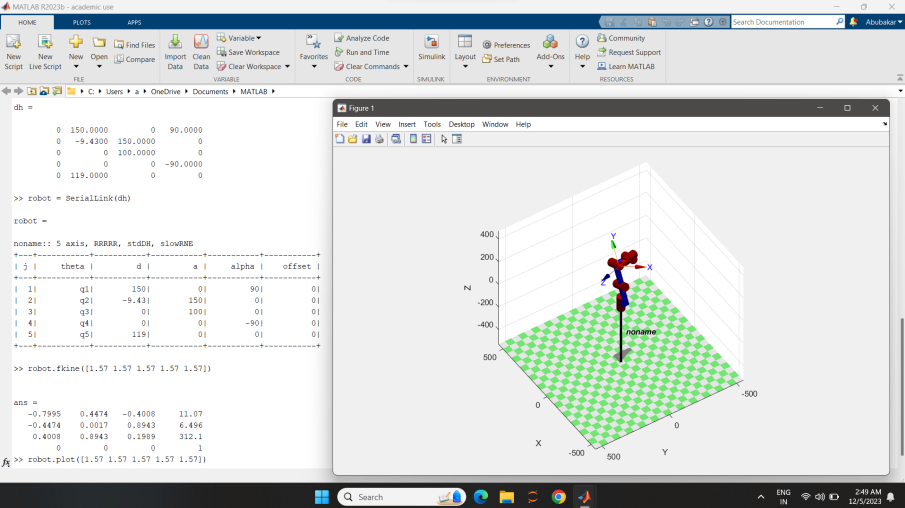
Efficient package handling through precise end-effector motion planning. Validated forward and inverse kinematics using MATLAB and RoboAnalyzer. Seamless LiDAR-based mapping for enhanced perception and future autonomous navigation. Reduced manual effort in warehouses, improving logistics and workflow efficiency.
Technologies Used:
This modular and scalable warehouse automation solution demonstrates the future of robotics-driven logistics, optimizing package handling with intelligent control and real-time perception.
Below is the full project report. You can view it directly here or download it.