Fuzzy Adaptive RRT*N Path Planning and Control for Autonomous Vehicles in CARLA
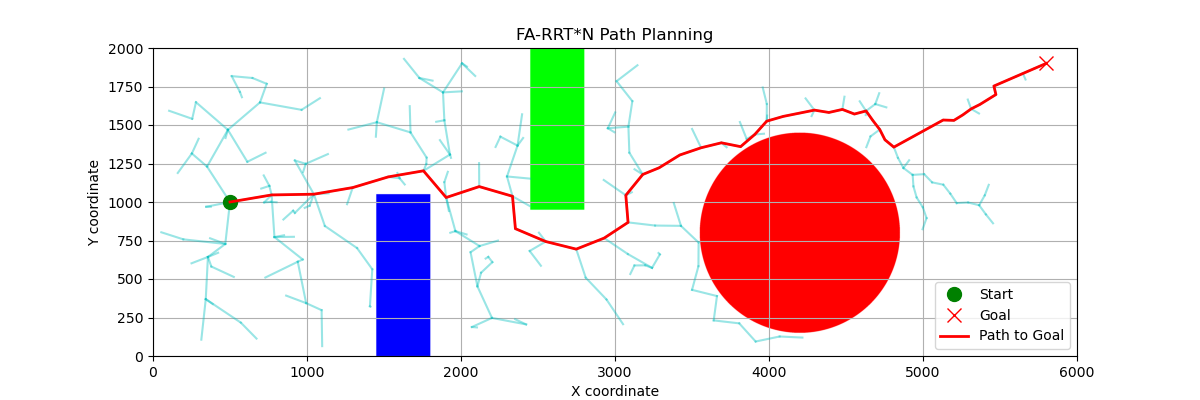
Overview: This project implements and evaluates Fuzzy Adaptive RRT*N (FA-RRT*N), an advanced path planning algorithm designed for autonomous vehicles in the CARLA simulator. FA-RRT*N extends RRT by incorporating fuzzy logic-based dynamic adjustments, optimizing path efficiency and computational performance in complex environments. The algorithm dynamically modifies sampling parameters based on obstacle density and goal proximity, leading to faster, collision-free, and optimized paths.
Video Presentation
CARLA siumulation of vehicle using this algorithm
Key Features:
- FA-RRT*N Algorithm: Enhances RRT*N by using fuzzy logic to dynamically adjust step sizes and goal biasing based on the environment. Reduces computational overhead and improves path smoothness.
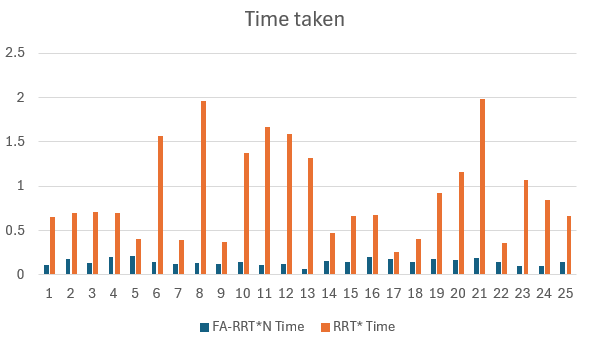
- Comparison with RRT*: 84% reduction in computation time. 68% fewer nodes explored while generating shorter paths. Higher-quality paths with reduced detours compared to standard RRT*.
- CARLA Simulator Integration: Implemented autonomous vehicle navigation using FA-RRT*N-generated paths. A Tesla Model 3 was controlled in CARLA using waypoints derived from the planned paths. Obstacle-aware navigation was tested across multiple simulated urban environments.
- Algorithm Performance Evaluation: Conducted 25 runs for each algorithm, comparing execution time, node count, and path quality. Demonstrated that FA-RRTN outperforms standard RRT in both efficiency and path optimality.
Results & Impact
FA-RRT*N reduced planning time by 84%, significantly improving computational efficiency. Generated paths were 74% shorter on average compared to RRT*, leading to smoother and more efficient navigation. CARLA simulations verified real-world feasibility, showing improved adaptability in complex road environments. Successfully addressed path planning challenges like dynamic obstacle avoidance, computational cost, and real-time feasibility.
Technologies Used:
- Path Planning: RRT*, RRTN, Fuzzy Adaptive RRTN
- Simulation: CARLA Autonomous Driving Simulator
- Control System: Python-based waypoint-following controller for vehicle navigation
- Optimization: Fuzzy Logic Controllers for adaptive step size tuning
This project demonstrates FA-RRT*N’s effectiveness in improving autonomous vehicle navigation and provides a foundation for advanced, real-time motion planning in self-driving systems.